ƒuƒچƒOBlog
2025”N12Œژ22“ْ [ƒAƒvƒٹ‰®‚³‚ٌ‚جIoT]
گ§Œنƒ‚پ[ƒ^پ[‚ج‰؛‚²‚µ‚炦
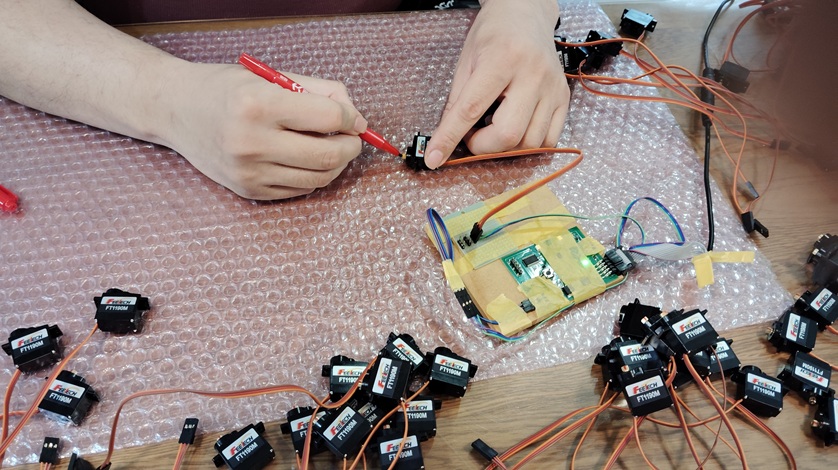 چ،‰ٌ‚حƒTپ[ƒ{ƒ‚پ[ƒ^پ[‚إ‚ ‚éFeeTech‚جFT1190MپB
چ،‰ٌ‚حƒTپ[ƒ{ƒ‚پ[ƒ^پ[‚إ‚ ‚éFeeTech‚جFT1190MپB‚»‚جڈ‰ٹْٹp“x‚ج’²گ®‚ًچs‚¤چى‹ئ‚ًڈذ‰î‚µ‚ـ‚·پB
ڈ¬Œ^‚إ‚ ‚è‚ـ‚·‚ھپAچ‚ƒgƒ‹ƒNپi—ح‹‚¢پj‚جƒTپ[ƒ{ƒ‚پ[ƒ^پ[پuFT1190MپvپB
چ،‰ٌ‚ح‹@ٹB‚ة‘g‚فچ‚ق‚½‚ك‚جڈ‰ٹْˆت’u‚ج’²گ®‚ًچs‚¢‚ـ‚·پB
ƒTپ[ƒ{ƒ‚پ[ƒ^پ[‚حپAژَگM‚µ‚½گMچ†‚جژü”gگ”‚ة‚و‚ء‚ؤپAŒˆ‚ك‚ç‚ꂽٹp“x‚ةژ~‚ـ‚郂پ[ƒ^پ[‚جˆêژي‚إ‚·پB
چׂ©‚¢گ¸“x‚إگ§Œن‚·‚邱‚ئ‚ھ‰آ”\‚إپAƒچƒ{ƒbƒgگ§Œن‚ةŒü‚¢‚ؤ‚¢‚ـ‚·پB
گو‚ةڈ‘‚¢‚½‚و‚¤‚ةپAƒ‚پ[ƒ^پ[‚ح“ü—ح‚³‚ꂽژü”gگ”‚إŒˆ‚ـ‚ء‚½ٹp“x‚إژ~‚ـ‚è‚ـ‚·پB
‚و‚ء‚ؤپA‘g‚فچ‚ق‘O‚ةڈ‰ٹْˆت’u‚ً‘µ‚¦‚é•K—v‚ھ‚ ‚è‚ـ‚·پB
چ،‰ٌ‚حپA‚»‚جچى‹ئ‚ة‚ب‚è‚ـ‚·پB
چى‹ئ“à—e‚حٹب’PپB
ژ،‹ïپiƒWƒOپj‚ةƒ‚پ[ƒ^پ[‚ًگع‘±‚µ‚ؤپAƒ{ƒ^ƒ“‚ً‰ں‚·‚¾‚¯پB
ژ،‹ï‚ح‚P•bٹش‚جƒCƒ“ƒ^پ[ƒoƒ‹‚ً‹²‚فپA‚Q‚©ڈٹ‚ةڈ‡ژںژ~‚ـ‚é‚و‚¤‚ةچى‚ç‚ê‚ؤ‚¢‚ـ‚·پB
‚Q‚©ڈٹ–ع‚ةژ~‚ـ‚ء‚½‚ئ‚±‚ë‚ةپAƒ}ƒWƒbƒN‚إƒ}پ[ƒJپ[‚ً‚آ‚¯‚ؤٹ®—¹‚إ‚·پB
ƒ}پ[ƒJپ[‚ً•t‚¯‚邱‚ئ‚إپA
پEƒeƒXƒg‚ًچs‚ء‚½‚±‚ئپiڈ‰ٹْ•s—ا‚ھ‚ب‚¢پj
پEƒ}پ[ƒJپ[‚ةچ‡‚¹‚ؤƒpپ[ƒc‚ًژو‚è•t‚¯‚邱‚ئ‚إپAژè–ك‚è‚ًڈ‚ب‚‚·‚é
‚ئ‚¢‚ء‚½Œّ‰ت‚ھٹْ‘ز‚إ‚«‚ـ‚·پB
چى‹ئ‚ح’Zژٹش‚إٹب’P‚إ‚ح‚ ‚è‚ـ‚·‚ھپA–â‘è‚حŒآگ”پB
‚±‚ج‹@ٹي‚إ‚حپA“¯‚¶ƒچƒbƒg‚إپAگ”•SŒآ‚ً’²گ®‚·‚é•K—v‚ھ‚ ‚è‚ـ‚·پB
ƒAƒvƒٹ‰®‚³‚ٌ‚©‚猩‚é‚ئپA•iژ؟ٹا—‚ج–ت‚ة‚¨‚¢‚ؤپAƒ\ƒtƒgƒEƒFƒA‚جچH’ِ‚ئ‚حˆل‚¤‚ب‚ئٹ´‚¶‚é‚خ‚©‚è‚إ‚·پB
ƒ\ƒtƒgƒEƒFƒA‚إ‚جƒfƒoƒbƒK‚ةˆت’u‚أ‚¯‚ئ‚ب‚éپAچ،‰ٌ‚جژ،‹ïپB
‚±‚جˆêژèٹش‚ھپA‚±‚جŒم‚جچى‹ئ‚ً‘ه•‚ةŒ¸‚ç‚·‚±‚ئ‚ھ‚إ‚«‚ـ‚·پB
چ،‰ٌ‚ح‘g‚فچ‚ف—pƒTپ[ƒ{ƒ‚پ[ƒ^پ[‚جڈ‰ٹْ‰»چى‹ئ‚ً‹Lژ–‚ة‚µ‚ـ‚µ‚½پB
IoTٹJ”‚ًچs‚ء‚ؤپAژdژ–‚جŒّ—¦‰»‚â–L‚©‚بگ¶ٹˆ‚ً‘—‚è‚ـ‚¹‚ٌ‚©پH
پuLet's extend technology!!پv
‚ًچ‡Œ¾—t‚ةپA
IoT‚جژ–—ل‚âƒqƒ“ƒgپAٹJ”‹L‚ً“ٹچe‚µ‚ؤ‚¢‚«‚ـ‚·پI
ƒnپ[ƒhƒEƒFƒA‹ئژز‚ئپAکb‚ھ‚¤‚ـ‚‚إ‚«‚ب‚¢پB
‚»‚ٌ‚ب‚ئ‚«‚حپA—¼•û‚ة‘خ‰‚µ‚ؤ‚¢‚镾ژذ‚ة‚²‘ٹ’k‚‚¾‚³‚¢پB
‚¨‘ز‚؟‚µ‚ؤ‚¨‚è‚ـ‚·پI