2025年09月29日
鍵のモーター制御(2)
 前回、モーター制御とモーターの種類を紹介しました。
前回、モーター制御とモーターの種類を紹介しました。
今回はDCモーターだけです。
ステッピングモーターも入手できていないため、検証できるのは時間制御とセンサー制御になります。
また、踏切棒式とカンヌキ式も試してみたいと思います。
まずは、プログラミングに関してです。
正の回転信号と負の回転信号を出力するポートを設定します。
これはモーター制御に起因するため、時間制御、センサー制御とも共用です。
次に、開閉ボタンをそれぞれポートに割り当てます。一つのボタンで制御することも可能ですが、途中で止まった場合など、プログラミングが複雑化するために、用途を分けました。
また、センサー制御用については、開閉時両方のセンサーがあるので、追加で2ポート準備します。
Cを知っているプログラマなら、簡単だと思います。
時間式については、タイマー関数を利用するだけで実装できます。
sleep関数(1000m秒)にてプログラムは止まっていますが、信号は出力し続けているため、一定期間の信号出力は問題ないでしょう。
一方のセンサー式は、センサーの信号をif分で検知し、信号の状態に合わせて信号出力を調整するだけです。ステートチャートを書けば、すぐにコーディングできると思います。
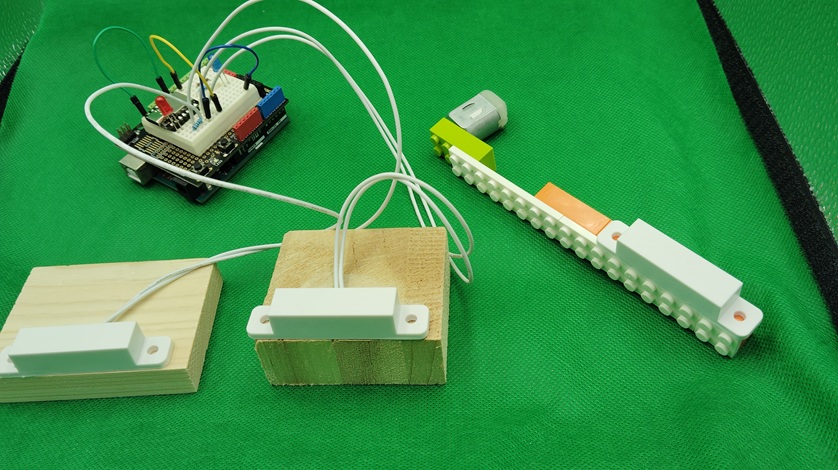
続いては、ハードウェアについてです。
踏切棒、カンヌキともおもちゃ用のブロックを利用しました。
耐久力に関してはほぼ見込めませんが、継ぎ足しや置換で好きな形状を組めるために、動作のプロトタイプとして十分だと思います。
続いてはモーター周りの回路についてです。
今回利用するモーターの定格は1.5V。対してXIAOの電圧は3.3Vです。また、マイコンとモーターを直接つないだ場合、モーターに負荷をかけるとマイコンボードに負荷がかかる可能性があります。
そこで、マイコン制御用の電気系統とモーラー制御用の電気系統を分けました。
※マイコンボードはUSB-C、モーターは乾電池
二つの電気系統がある場合、どの様に信号の伝達を行うのでしょうか。
色々方法はありますが、今回は電圧も低く、電流値も大きくはないため、トランジスタを利用することにしました。
トランジスタは、ある端子に電圧が掛かっているときに、残りの2端子の回路がつながるようになっています。
この仕組みを利用することで、制御部はトランジスタの端子に信号を送るだけでスイッチのオン/オフを実現することができます。
今回の回路(ハードウェア)での特徴は、以上でしょうか。
最後に、簡単に結果報告をして終わりにしたいと思います。
いずれのパターンも、モーターの高速回転にソフトウェアを持っても、安定化した動きは見えませんでした。
やはりギア(歯車)を導入して、スピードの低下と、駆動部分とのズレが起きないようにする必要性を感じました。
ステッピングモーターの利用も考慮に入れて、もう一回チャレンジしてみようと思います。
(TAMIYA社ギアーボックスシリーズがあれば楽できたのですが、品切れ)
今回はモーター制御の実験結果を記事にしました。
IoT開発を行って、仕事の効率化や豊かな生活を送りませんか?
「Let's extend technology!!」
を合言葉に、
IoTの事例やヒント、開発記を投稿していきます!
ハードウェア業者と、話がうまくできない。
そんなときは、両方に対応している弊社にご相談ください。
お待ちしております!
![]()